Description
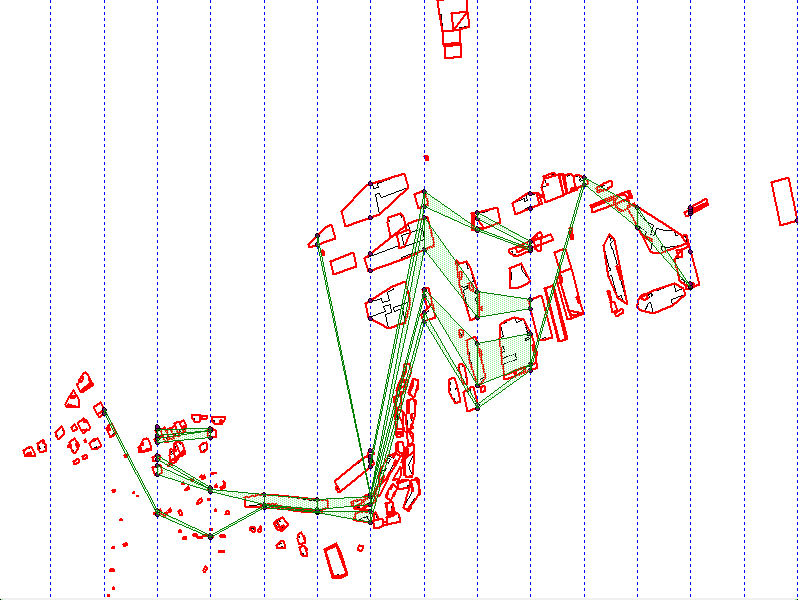
Application de géométrie algorithmique en Python (Tkinter) permettant de planifier un plus court chemin dans un plan contenant des obstacles polygonaux, à partir d’un partitionnement du domaine. Le programme charge un plan cadastral (données JSON de bâtiments), sélectionne une zone d’intérêt, approxime les obstacles par des enveloppes convexes, puis construit une carte trapézoïdale de l’espace libre par balayage (scanline). À partir de cette subdivision, un graphe planaire est généré afin de relier les zones navigables. L’utilisateur choisit un point de départ et un point d’arrivée, puis l’application calcule et affiche un chemin optimal (Dijkstra, ou A* selon la stratégie) en évitant les bâtiments.